Sarsa
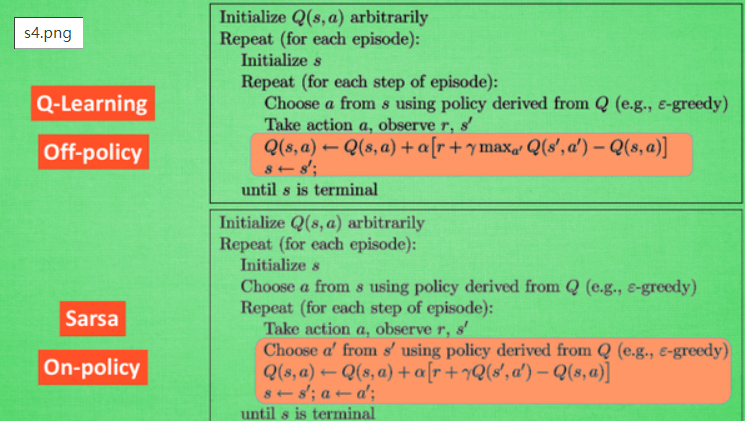
Sarsa 的决策部分和 Q learning 一样,都是基于 Q 表的形式决策, 在 Q 表中挑选值较大的动作值施加在环境中来换取奖惩.。但是不同的地方在于 Sarsa 的更新方式是不一样的。
Q learning 估算动作,但并不一定会执行这个动作,Q-learning 在这一步只是估计了一下接下来的动作值。而sarsa 估算的动作也是接下来要做的动作。因为 Sarsa 是说到做到型, 所以我们也叫他 on-policy, 在线学习, 学着自己在做的事情。在 sarsa 算法中,行动策略和目标策略都是epsilon-greedy。相比之下q-learning只有行动策略是epsilon-greedy,而目标策略是贪婪策略。
算法的区别:
- action_ 不同:Sarsa 在当前
state已经想好了state对应的action, 而且想好了 下一个state_和下一个action_,在下一个 state 就会执行这个action_,Qlearning 还没有想好下一个action_,这里只是估计了action_,会在下一个 state 里面重新选择 action。 - Sarsa 更新
Q(s,a)的时候基于的是下一个Q(s_, a_),Qlearning 是基于maxQ(s_),因为此时 q_learing 还没有确定下一步的 action_
这样看来 Q learning 每次都是朝着 maxQ(s_) 去选择 actions ,他看起来更加勇敢也变得贪婪。Sarsa 是 尽量避免踩坑,在陷阱周围,agent 看起来更加犹豫,它是一种保守的算法, 他在乎每一步决策,。
算法的代码形式

- 开始初始化 observation ,在当前状态下选择一个 action
- 通过与环境交互然后获得下一个 observation_ ,reward ,
- 估算下一个
action_, - 开始学习,更新 q 表
- 把当前状态下确定的 observation_ 和 action_ 交换为下一个状态的 observation 和 action
- 在下一个状态直接执行这个
action_,获得接下来的observation_。
update 的代码如下
1 | def update(): |
学习 learn, Q 值是根据 q(s, a) 来确定的
1 | def learn(self, s, a, r, s_, a_): |
Sarsa(lambda)
Sarsa 是一种单步更新,也就是每走一步就会更新一次,并记录这些 state(但是并没有 记录这些 state 距离宝藏的是更近更快还是更慢),在一开始因为对最优值没有头绪,会在原地打转重复,最后才会找到最优值,这些重复打转看起来就很没有必要,反而影响效率。那怎么让 Sarsa 也知道哪些步数是距离 最优解近的,哪些是远的,从而更新距离宝藏近的步数?
单步更新 and 回合更新
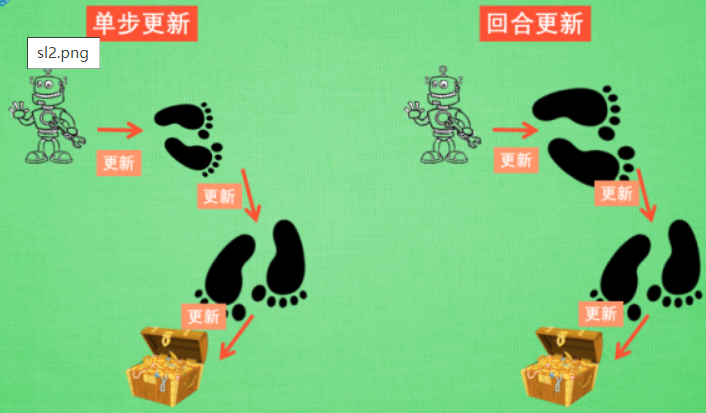
单步更新是每一步都会进行更新 Q表,但是在没有获取宝藏的时候, 我们现在站着的这一步也没有得到任何更新(这一步是离宝藏近 还是 离宝藏远无从知道), 直到获取宝藏时, 我们才为获取到宝藏的上一步更新为: 这一步很好, 和获取宝藏是有关联的, 而之前为了获取宝藏所走的所有步都被认为和获取宝藏没关系。
回合更新是等到这回合结束, 才开始对本回合所经历的所有步都添加更新, 但是这所有的步都是和宝藏有关系的, 都是为了得到宝藏需要学习的步, 所以每一个脚印在下回合被选则的几率又高了一些.,在这种角度来看, 回合更新似乎会有效率一些。
Sarsa($\lambda$)
为了让 Sarsa 知道哪一步离宝藏近,需要引入一个参数 lambda 。其实 lambda 就是一个衰变值, 他可以让你知道离奖励越远的步可能并不是让你最快拿到奖励的步, 所以我们想象我们站在宝藏的位置, 回头看看我们走过的寻宝之路, 离宝藏越近的脚印越看得清, 远处的脚印太渺小, 我们都很难看清, 那我们就索性记下离宝藏越近的脚印越重要, 越需要被好好的更新. 和之前我们提到过的 奖励衰减值 gamma 一样, lambda 是脚步衰减值, 都是一个在 0 和 1 之间的数.
当 lambda 取0, 就变成了 Sarsa 的单步更新, 当 lambda 取 1, 就变成了回合更新, 对所有步更新的力度都是一样. 当 lambda 在 0 和 1 之间, 取值越大, 离宝藏越近的步更新力度越大. 这样我们就不用受限于单步更新的每次只能更新最近的一步, 我们可以更有效率的更新所有相关步了
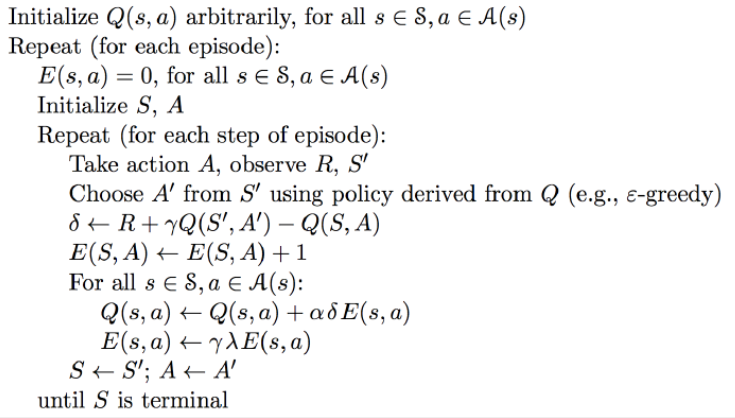
Sarsa-lambda 算法
算法如下:E(s,a) 是一个用来记录 lambda 的表格,它和 Q table 结构相同。$\delta$ 是误差: $q_{现实} - q_{预测}$。更新 Q table 和 E table 的公式是:
$$
Q(s, a) = Q(s, a) + α [R + {\gamma} Q(s_, a_) - Q(s, a)]E(s, a)\
\
E(s, a) = \gamma\lambda E(s, a)
$$
学习 learn
Sarsa-lambda 的一开始创建了结构和 Q table 相似的 eligibility_trace 表。表格的横轴是 state,纵轴是 action,value 值是 lambda 的衰减值(也就是记录了每个走过的 action 距离最优解的是否更近更快),解决了 Sarsa 单步更新只会更新到达最优解的 action。
eligibility_trace
- 初始化时,浅拷贝 Q table:
self.eligibility_trace = self.q_table.copy() - 和 q_table 一样 check_state_exist ,加入新的 state 到表中,默认值为全 0
- 更新 Q table 的时候: 公式按照上面的公式来。
- 更新 eligibility_trace :对于经历过的 state-action, 我们让他+1, 证明他是得到 reward 路途中不可或缺的一环。
- 每经过的 [ s,a] value 值都 +1 ,但是考虑累加值,每次都让 [s,:]所在的行 所有 值重置为 0 ,之后在 [ s,a] +1。
- lambda 衰减。定义一个 衰减系数 $\lambda$,每次eligibility_trace 的值都乘以一个$\lambda$ (衰减系数)和 γ (对未来奖励衰减系数)
1 |
|